|
|産品介紹
信息技術服務
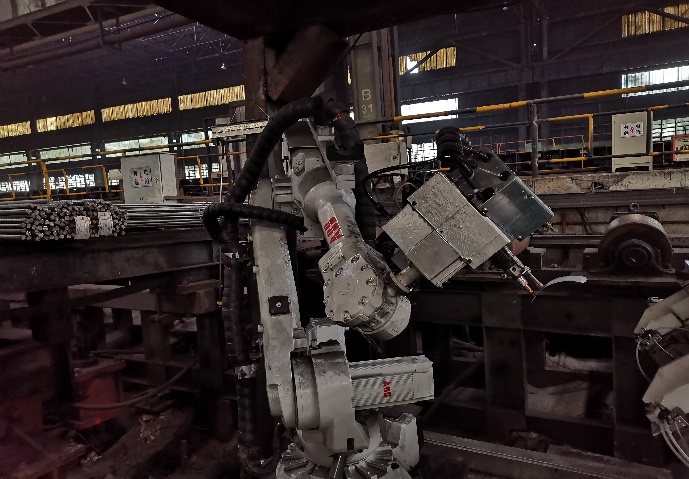
棒材焊标機器人系統
産品介紹
針對冶金行業工(gōng)作環境差、依靠笨重勞動和落後工(gōng)具在高溫、高粉塵、高噪音、高危險環境下(xià)進行高強度作業存在安全風險大(dà)、效率低、準确率不高等問題,結合生(shēng)産現場的使用情況和技術要求,研發針對焊接标牌的功能性機器人系統。
本系統根據用戶工(gōng)件建立工(gōng)件模型,根據工(gōng)件模型及焊接點确定機器人工(gōng)作站結構形式,采用視覺系統優選算法對待焊标棒材進行識别定位,進行三維坐标轉換,引導機器人進行标牌焊接。通過對機械手運動控制算法進行優化,完成焊釘和标牌的準确抓取,最終實現标簽的準确焊接。
本系統可根據用戶需求進行配置,機器人可以與單目相機、雙目相機、3D線掃相機靈活搭配,實現螺紋鋼、棒材的焊标和計數。
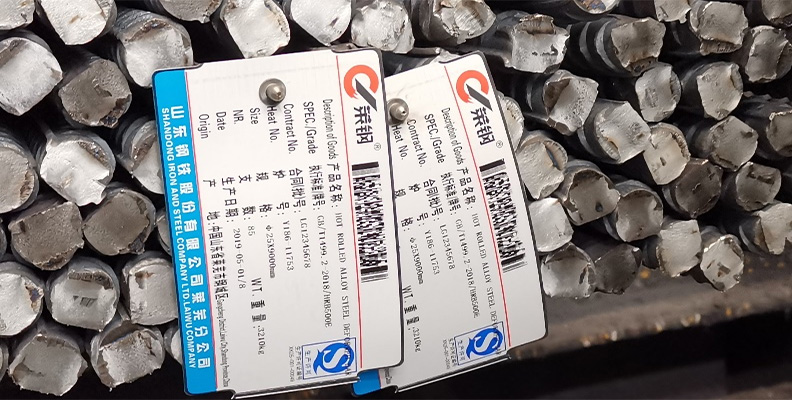
本系統與生(shēng)産系統通訊,自動接收用戶生(shēng)産數據,實現标牌數據自動傳送、标牌自動打印及整理,焊标内容0錯誤。

核心功能
- 1、視覺系統定位快速準确
- 2、附屬設備自動冗餘切換
- 3、待焊鋼捆異常監測功能
- 4、焊标結果自動校驗
系統特色
- 1、本系統可以廣泛應用于螺紋鋼、棒材的焊标和計數。視覺系統分(fēn)為單目加激光定位、雙目結構光、3D線掃等多種方案,用戶可根據實際情況進行靈活搭配獲得最優解決方案。
- 2、本系統有防高溫保護,可以在現場高溫環境連續作業。
- 3、本系統的熱備冗餘設計,能夠在不中(zhōng)斷生(shēng)産的前提下(xià)對焊釘,标簽等耗材進行添加更換,大(dà)大(dà)提高了系統運行可靠性。
預期效果
- 1、圖像識别成功率100%
- 2、兩張标牌焊接周期小(xiǎo)于30秒
- 3、焊标成功率99%
- 4、焊标結果自動校驗
- 5、标牌焊接牢固準确
案例展示